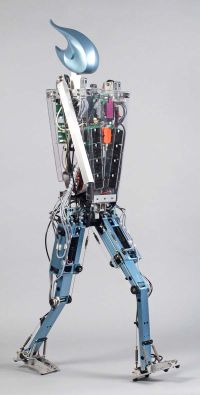
Un estudiante de doctorado holandés llamado Daan Hobbelen ha estado desarrollando durante los últimos años un proyecto muy especial para su PhD por la Universidad Técnica de Delft: un robot al que ha bautizado con el nombre de Flame que es capaz de caminar a imagen y semejanza de como lo hace el ser humano.
A diferencia de otros prototipos, Flame no anda en base a unas rutinas preestablecidas, sino que trata de simular la forma en que se desplazan las personas. Así, su movimiento es menos rígido, más fluido y más eficiente desde el punto de vista energético de lo que estamos acostumbrados a ver en la mayoría de robots actuales.
Flame está impulsado por 7 motores, que a su vez están gobernados por un pequeño ordenador que se encarga de analizar el medio por el que se está desplazando y corregir el movimiento de los ejes inferiores para mejorar la estabilidad del conjunto. Así, llegado el caso puede decidir que un paso se alargue más de lo que sería normal para evitar una posible caída.
Aquí tenéis un vídeo del robot en movimiento. Aunque, obviamente, no llega al nivel de ASIMO, la manera tan natural de mover sus piernas es digna de ver:
 Slay the Spire 2 se convierte en uno de los juegos más populares de la historia de Steam
Slay the Spire 2 se convierte en uno de los juegos más populares de la historia de Steam La nebulosa de emisión y superburbuja N44
La nebulosa de emisión y superburbuja N44 Cuál es el mejor Nintendo Switch para tu estilo de juego
Cuál es el mejor Nintendo Switch para tu estilo de juego Microsoft presenta Project Helix, la Xbox de nueva generación que está desarrollando
Microsoft presenta Project Helix, la Xbox de nueva generación que está desarrollando